
此前对于rl的这两个概念一直很模糊,在此整理一下。
首先介绍下行为策略和目标策略:
- 行为策略(Behavior Policy):用来收集数据的策略,也就是实际与环境交互、生成样本的策略。
- 目标策略(Target Policy):我们要学习和优化的策略,也就是最终想要得到的策略。
如果行为策略与目标策略一致,则是on-policy,否则为off-policy。
下面将以两个经典算法为例介绍on-policy、off-policy区别。
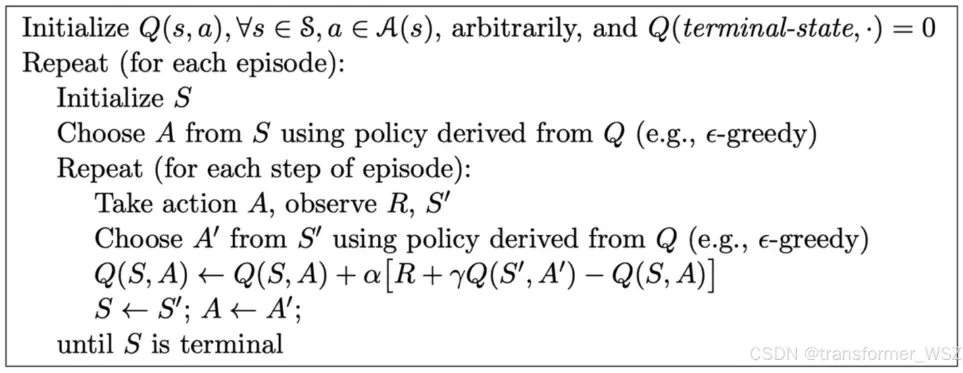
SARSA(On-policy)
算法流程如下:
python伪代码如下:
1 | # SARSA 算法 |
| 策略类型 | 是什么 | 在代码中的位置 |
|---|---|---|
| 行为策略 | ε-greedy | epsilon_greedy(Q, state) |
| 目标策略 | ε-greedy | 同上,就是同一个策略 |
收集数据时用的是 ε-greedy,更新时用的还是 ε-greedy 选的 next_action,两者策略一致,是on-policy。
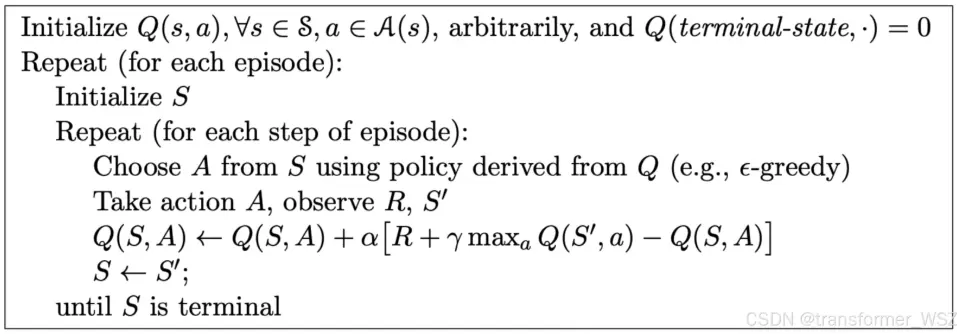
DQN(Off-policy)
算法流程如下:
python伪代码如下:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28# DQN 算法
def dqn():
Q = Network() # Q网络
replay_buffer = [] # 经验池
for episode in range(N):
state = env.reset()
while not done:
# ⚠️ 关键点1:行为策略是 ε-greedy
action = epsilon_greedy(Q, state) # 这就是当前的行为策略
# 执行动作,存经验
next_state, reward, done = env.step(action)
replay_buffer.append((state, action, reward, next_state, done))
# ⚠️ 关键点2:从经验池采样(可能是旧策略的数据)
batch = random.sample(replay_buffer, 32)
for s, a, r, s_next, d in batch:
# ⚠️ 关键点3:目标策略是 greedy!
target = r + gamma * max(Q_target(s_next)) # 用 max,不是 ε-greedy!
# 更新 Q 网络
loss = MSE(Q(s)[a], target)
loss.backward()
state = next_state
| 策略类型 | 是什么 | 在代码中的位置 |
|---|---|---|
| 行为策略 | ε-greedy | 收集数据时的策略 |
| 目标策略 | greedy | 更新时的 max(Q_target(s_next)) |
收集数据用的ε-greedy,但更新永远选最好的动作greedy,两者策略不一致,是off-policy。