AIGB:用扩散模型颠覆传统自动出价范式

这是阿里巴巴在广告自动出价的一篇工作,用扩散模型颠覆了传统深度rl出价的范式,取得了线上线下的巨大收益。
一、自动出价问题定义
在广告竞价中,广告主需要在有限预算下,为每个展示机会出价,最大化总价值:
理论上的最优出价形式为:
其中 $\lambda_j$ 是需要动态调整的出价参数。
二、传统DRL出价 VS AIGB
马尔可夫假设的问题:传统RL假设下一状态只取决于当前状态和动作:
但论文的统计分析发现:随着历史序列长度增加,与下一状态的相关系数显著上升。
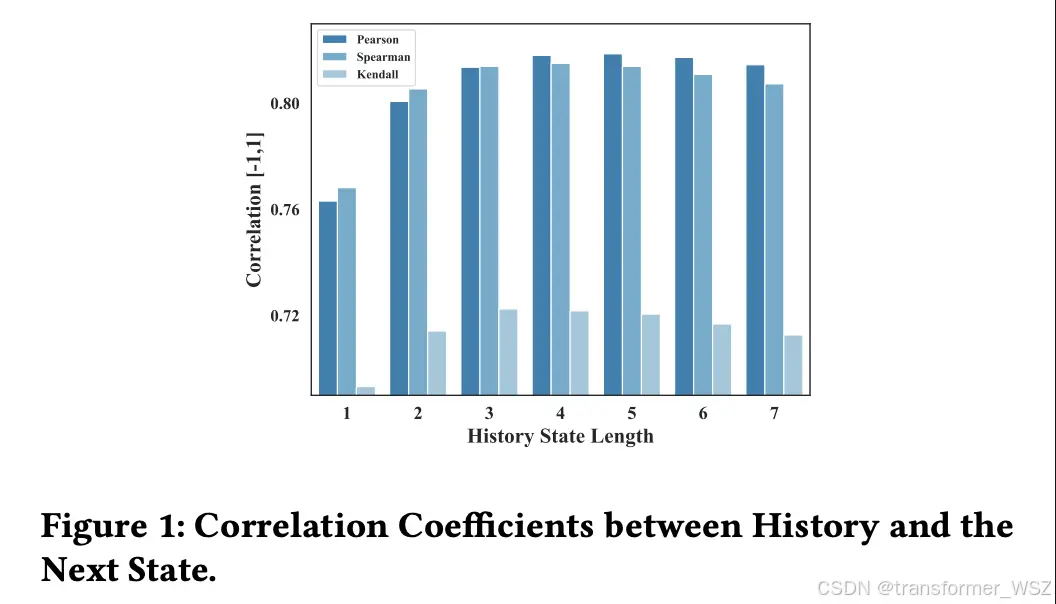
这说明历史信息对预测未来状态很重要,但MDP假设丢弃了这些信息。
针对DRL的缺陷,AIGB直接建模总收益与整个状态轨迹的关联性:
| 方面 | 传统RL的MDP缺陷 | AIGB的全局建模如何解决 |
|---|---|---|
| 状态转移假设 | 只依赖当前状态 | 建模整个轨迹分布 |
| 长期依赖 | 误差累积 | 一次生成整个序列 |
| 稀疏回报 | 难以学习 | 直接以最终收益为条件 |
| 环境随机性 | 单步预测不稳 | 全局模式更鲁棒 |
| 约束满足 | 难控制 | 条件生成保证 |
三、AIGB范式:从”逐步决策”到”全局生成”
3.1 核心思想转变
| 维度 | 传统RL | AIGB(全局生成) |
|---|---|---|
| 建模对象 | 单步转移 $P(s_{t+1} \mid s_t,a_t)$ | 整个轨迹 $p(x_0(\tau) \mid y(\tau))$ |
| 优化目标 | 最大化累计奖励 | 最大化条件似然 |
| 决策方式 | 逐步决策(online) | 全局规划后执行(Planning&Control) |
3.2 整体框架
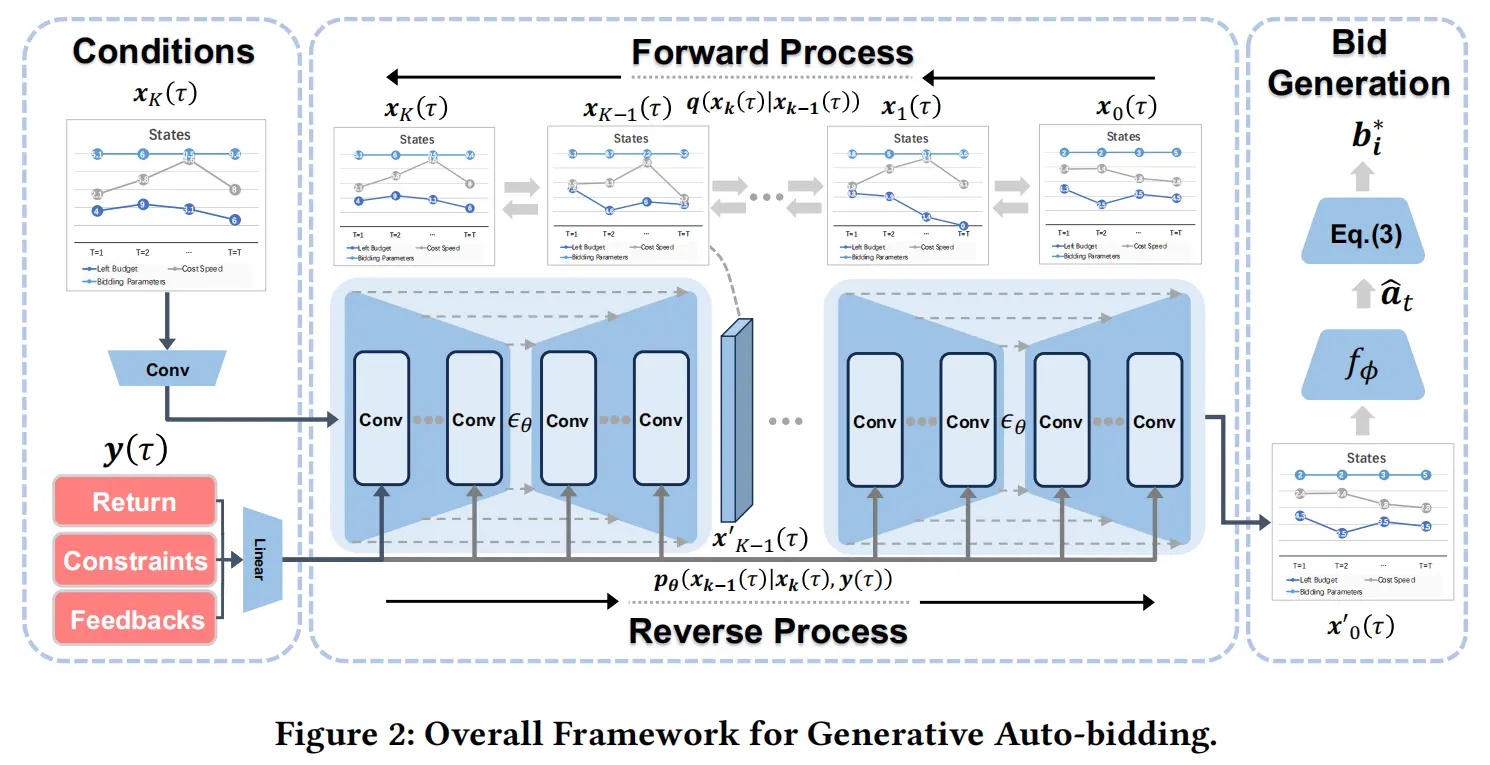
- Planning生成整条轨迹:用扩散模型生成整个未来状态轨迹
- Control生成出价动作:用逆动力学模型反推出当前动作,逼近规划轨迹
四、DiffBid:扩散出价模型详解
4.1 问题建模
将自动出价建模为条件概率问题:
其中:
- $x_0(\tau)$:完整状态轨迹 $[s_1, s_2, …, s_T]$,$s_t$包含剩余预算、预算消耗速度等等
- $\boldsymbol{y}(\tau)$:轨迹属性,包含总收益、约束条件等等
4.2 扩散过程设计
前向加噪
反向去噪
- 预测噪音:
- 去噪生成下一状态轨迹:
4.3 逆动力学:从未来状态反推动作
根据历史状态和预测的下一个目标状态,直接生成当前应采取的最优出价动作,即$\lambda_0, \lambda_1, \dots,\lambda_J$
4.4 训练loss
4.5 线上推理流程
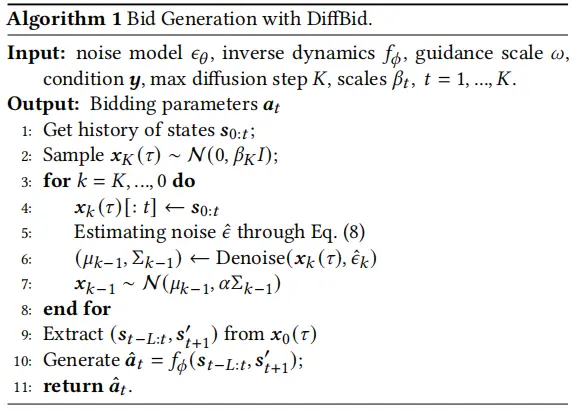
- 每次时间步$t$重新生成整个未来轨迹,即$t-1$生成的$x_0(\tau)$与$t$生成的$x_0(\tau)$无关
- 根据历史状态和预测下一状态,用idm来生成出价动作
- 每步解码都注入历史状态保证已发生的不变
五、实验结果
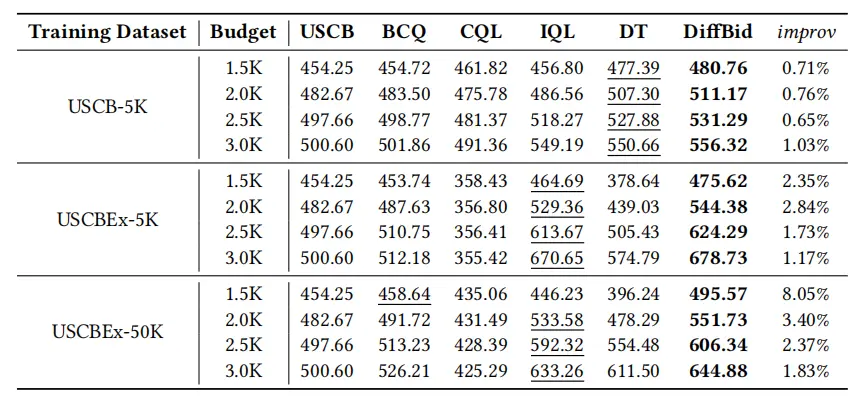
DiffBid在各数据集上都取得了sota,并大幅领先所有baseline。
六、FAQ
- AIGB是根据马尔科夫假设单步去噪的,它是如何体现全局建模的?
实际上这两者并不冲突,每步diffusion去噪是生成整个状态轨迹。而全局建模是指在单条状态轨迹中,所有历史状态均对最终收益产生直接影响,有如下两点体现:
- 建模MLE:$\max_{\theta}\mathbb{E}_{\tau\sim D}[\log p_{\theta}(x_0(\tau)|\boldsymbol{y}(\tau))]$
- 历史状态和预测状态影响出价动作:$\hat{\boldsymbol{a}}_t = f_{\phi}(s_{t-L:t}, s_{t+1}’)$
- diffusion需要多步去噪,线上RT高如何解决?
论文里也提到了这个问题,推理耗时与去噪步数成正比。对于文生图模型,为确保图片质量,步数会非常大,但对于出价问题,较小的步数已经能保证较好的实验效果,且自动出价对实时性要求不高。